視覚化テンプレートを使用してCFCの単一軸の動きを制御する
を参照してください PLCopenSingle2.project のインストールディレクトリにあるサンプルプロジェクト CODESYS 下 ..\CODESYS SoftMotion\Examples。
STの代わりに他のIEC実装言語(ここではCFCなど)を使用することもできます。この言語は、機能ブロックの開始および割り込みメカニズムを示しています。さらに、機能ブロックのさまざまな開始モード MC_MoveAbsolute 回転軸をテストできます。
名前の付いた仮想ドライブを挿入します
Drive下のデバイスツリーで SoftMotion一般軸プール。オブジェクトをダブルクリックして、エディターを開きます。
パラメータを360°周期のロータリードライブに変更します。
軸タイプ:モジュロ
モジュロ値[u]:360.0
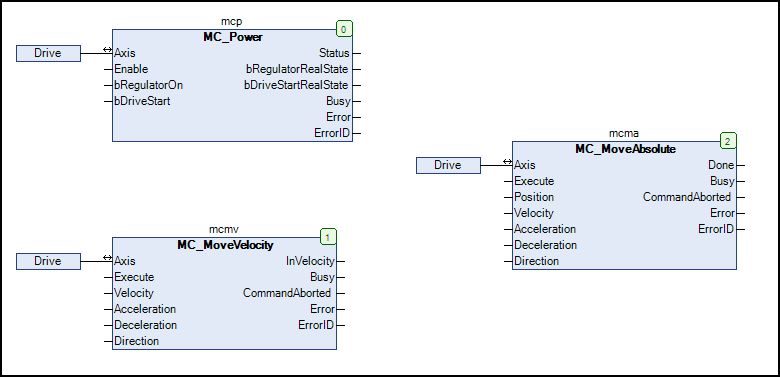
作成する MOTION_PRG CFCのプログラム。機能ブロックを挿入します
MC_Power、MC_MoveAbsolute、 とMC_MoveVelocity。通常、ファンクションブロック入力を初期化することをお勧めします。その後、このテストアプリケーションを起動するときに、値を何度も指定する必要はありません。
PROGRAM MOTION_PRG VAR mcp: MC_Power := (Enable:=TRUE, bRegulatorOn:=TRUE, bDriveStart:=TRUE); mcmv: MC_MoveVelocity :=(Velocity:=100, Acceleration:=100, Deceleration:=100, Direction:=positive); mcma: MC_MoveAbsolute := (Position:=180, Velocity:=100, Acceleration:=100, Deceleration:=100, Direction:=positive); END_VARCFC:
の呼び出しを追加します
MOTION_PRGタスクへのプログラム 主な任務。追加する 視覚化 アプリケーションに反対します。
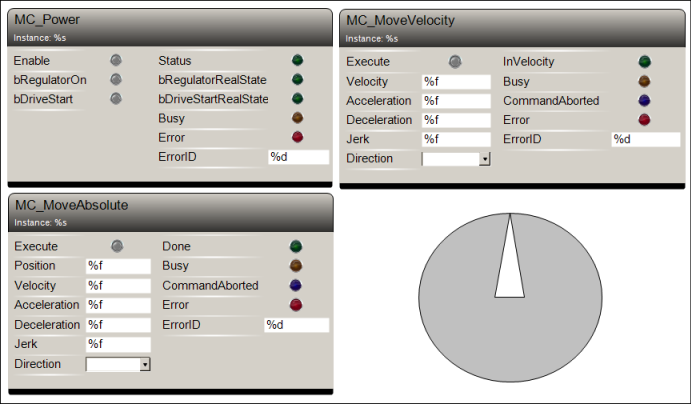
視覚化テンプレートを配置します VISU_NEW_MC_MoveAbsolute、 VISU_NEW_MC_MoveVelocity、 VISU_NEW_MC_Power、 と RotDrive 視覚化エディタで。これらをの機能ブロックインスタンスにリンクします
MOTION_PRG。視覚化:
プロジェクトをビルドし、PLCにダウンロードします。プロジェクトを開始します。
エディターでビジュアライゼーションを開きます。クリック 有効 入力(MC_Power)、次に 実行する 入力(MC_Move_Absolute)。
ドライブが回転します。
を開きます ドライブ エディターの仮想軸。
の中に オンライン の一部 全般的 タブ、あなたは軸の動きを見る。
これらの機能ブロックのパラメーターを試してください。パラメータを変更し、動作を観察します。